*BASIC LINE FOLLOWER*
Final Top-View of the ROBOT done on montfort
school ,Trichy on 18/09/14
This would be my first post and i would be teaching you how to make an "Perfect Line Follower Robot". Before getting into the technical description of the robot i would like to tell you how the robot is going to work and the ways you can build one and the materials required and where you can get those.
CONCEPT BEHIND LINE FOLLOWING
BLACK BODY EFFECT
A
black body allows
all incident radiation to pass into it (no reflected energy) and internally absorbs
all
the incident radiation (no energy transmitted through the body). This
is true for radiation of all wavelengths and for all angles of
incidence. Hence the black body is
a perfect absorber for all incident radiation.
So since fortunately darker bands absorb the light rays incident to it we are glad to make a sensor which would work by emitting a INFRARED RAY on the darker band and get a response back to judge a dark and the light band.
working of the robot
SINGLE SENSOR LINE FOLLOWER
Making a single sensor line follower is simple.The complexity of any line follower increases only when certain constraints are applied on the line on which it is gonna travel.The single sensor robot will take the algorithm as follows:
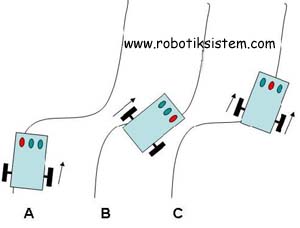
IF ROBOT PLACED ON THE LEFT SIDE OF THE BLACK LINE
when sensor is not returning any potential difference the robot will turn left and when the sensor returns certain potential difference it would take a right turn.so this concept makes the robot follow the line.(PROGRAM SHALL E WRITTEN IN THE END OF THE POST)
IF ROOT PLACED ON THE RIGHT SIDE OF THE BLACK LINE
when sensor is not returning any potential difference the robot will turn right and when the sensor return certain potential difference it would take a left turn.
TWO SENSOR LINE FOLLOWER

THREE SENSOR ROBOT
 CASE 1:
CASE 1:In a three sensor robot when the sensor 2 gets lowered then both the motor rotates in same direction in order to move forward.
CASE 2 :If the sensor 1 and sensor 2 returns a potential difference and sensor 3 doesn't return a potential difference then the Bot knows that it is in the left side of the line and it has to make a right turn.
NOTE: YOU CAN MAKE TWO POSSIBLE RIGHT TURN
FIRST WAY(REGULAR WAY)
----> Stop the left motor and run the right motor in the direction in order to move forward.
SECOND WAY(FAST TURN)
----->Instead of stopping the left motor run it in the Anti-clock wise direction and the right motor should be made to run in clockwise direction which makes the robot to stay still in the same place to have a small right turn and return to the previous condition.
CASE 3: vice verse
of case 2
MATERIALS NEEDED TO MAKE A LINE FOLLOWER ROBOT
1) chassis
2)micro-controller for the computation
3)motor driver
4)batteries(High current preferred)
5)Two DC motors (RPM based on your requirements)
6)two wheels
7)IR sensors
------------->If you need any materials you can contact me @ narendranmontfort@gmail.com (or) https://www.facebook.com/narendranmontfort
**MAKING OF THE BOT SHALL BE POSTED IN MY NEXT POST....!!STAY TUNED..!!


