Step by Step

Free Recharge of Rs.70 for Downloading Teenpatti App
1) Download App --> http://goo.gl/wfD2oW
2) Login using Facebook and click on World cup and download some resources when asked
3) Now keep tapping on right arrow (>) till the last last screen appears
4) Then on the next screen scroll down and enter your email address & click on I AGREE
(Scroll down only then you can enter Email-Id)
5) You will get a verification email. Verify it and after that click on the PLAY button to participate.
That's it. You will get 2 freecharge coupon on your facebook email id within 6 hours.1 coupon value is Rs.20 and another coupon value is Rs.50
Use these coupons on Freecharge App to Recharge with rs.20 and 50
Offer Valid till 24 December
Any Problem occur then comment we will reply you.
Must give us a like on this post.Your likes encourage to post more big offers
**********************************************************************
Free Recharge Contest Rs.50 based on Predict.
1) Public your friendlist and person whose friends is 200 or above is valid for this contest only.
2) Share this post publicly and Predict (1-100) what number is store in this file --> http://www.datafilehost.com/d/46fa5ee7
( We have store a number between 1-100 in file so comment number between 1 to 100 only )
3 person whose number is close to our number will get Rs.50 Recharge.You can Participate till Tomorrow (25 November ) 3PM only.Winner will declare in comment box and we will reply to winners to claim their Recharge
Free Recharge of Rs.70 for Downloading Teenpatti App
1) Download App --> http://goo.gl/wfD2oW
2) Login using Facebook and click on World cup and download some resources when asked
3) Now keep tapping on right arrow (>) till the last last screen appears
4) Then on the next screen scroll down and enter your email address & click on I AGREE
(Scroll down only then you can enter Email-Id)
5) You will get a verification email. Verify it and after that click on the PLAY button to participate.
That's it. You will get 2 freecharge coupon on your facebook email id within 6 hours.1 coupon value is Rs.20 and another coupon value is Rs.50
Use these coupons on Freecharge App to Recharge with rs.20 and 50
Offer Valid till 24 December
Any Problem occur then comment we will reply you.
Must give us a like on this post.Your likes encourage to post more big offers
**********************************************************************
Free Recharge Contest Rs.50 based on Predict.
1) Public your friendlist and person whose friends is 200 or above is valid for this contest only.
2) Share this post publicly and Predict (1-100) what number is store in this file --> http://www.datafilehost.com/d/46fa5ee7
( We have store a number between 1-100 in file so comment number between 1 to 100 only )
3 person whose number is close to our number will get Rs.50 Recharge.You can Participate till Tomorrow (25 November ) 3PM only.Winner will declare in comment box and we will reply to winners to claim their Recharge


















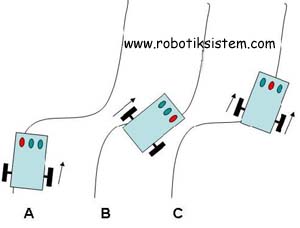 CASE 1:In a three sensor robot when the sensor 2 gets lowered then both the motor rotates in same direction in order to move forward.
CASE 1:In a three sensor robot when the sensor 2 gets lowered then both the motor rotates in same direction in order to move forward.